Waarom vertrouwt u ons bedrijf?
We halen de paniek uit de inkoop. We hebben miljoenen moeilijk te vinden onderdelen uit onze vertrouwde bronnen op voorraad. We vernieuwen onze productvermeldingen met minuten en online aankopen worden in realtime voltooid en elke dag verzonden.
MFGChips, opgericht in 2002, is een lokale leider in de distributie van elektronische componenten en wordt tegenwoordig ook erkend als een van de meest gerespecteerde en innovatieve bedrijven op de lokale markt. MFGChips heeft zijn hoofdkantoor in Hong Kong en heeft een indrukwekkende reputatie opgebouwd voor het leveren van uitstekende service en het ontwikkelen van efficiënte, uitgebreide wereldwijde supply chain-oplossingen.
Kom meer te weten >
Robots krijgen op elanden geïnspireerde voeten
Onderzoekers van Tallinn University of Technology (Taltech) hebben een nieuw type bio-geïnspireerde robotvoeten gemaakt die zijn ontworpen om de mobiliteit op moeilijke oppervlakken zoals modder en natte sneeuw te verbeteren.Hun studie benadrukt hoe deze innovaties robots in staat kunnen stellen om complexe natuurlijke terreinen te navigeren, ter ondersteuning van milieumonitoring, landbouw en rampenrespons.
Hoewel been robots al tientallen jaren worden bestudeerd en energiezuiniger en aanpasbaarder worden, blijven bepaalde natuurlijke terreinen bijzonder uitdagend.Deze nieuwe voeten zijn bedoeld om dergelijke obstakels te overwinnen door te verbeteren hoe robots hun bewegingen aanpassen aan verschillende grondomstandigheden.
Lab -experimenten met echte elandenvoeten hebben hun unieke functionaliteit bevestigd.Bij het stappen in en uit modder, breiden de gesplitste hoeven van de elanden zich uit en samentrekken ze hun contactgebied aan.Het primaire voordeel is echter niet het verhoogde oppervlak.In plaats daarvan komt het van hoe de gespleten hoeven de zuigkracht breken wanneer ze uit de modder worden getrokken.
Onderzoekers merkten op dat de hoef van een eland op dezelfde manier functioneert als een zuigbeker.Door zijn vorm aan te passen, breekt de hoef de zuigkracht die wordt gecreëerd door modder, net zoals een zuigbeker van een oppervlakte prijzen.Modder gedraagt zich op dezelfde manier als een natte badkamertegel, die zuigkracht genereert onder de voeten van het dier, waardoor tillen het been uitdagend maakt.De beweging van de hoeven verstoort deze spanning en vergemakkelijkt een gemakkelijkere beweging.De hoeven maken beweging sneller en energiezuiniger, waardoor potentieel fatale situaties worden voorkomen waarin het dier te diep zou kunnen zinken, vastlopen en vergaan.
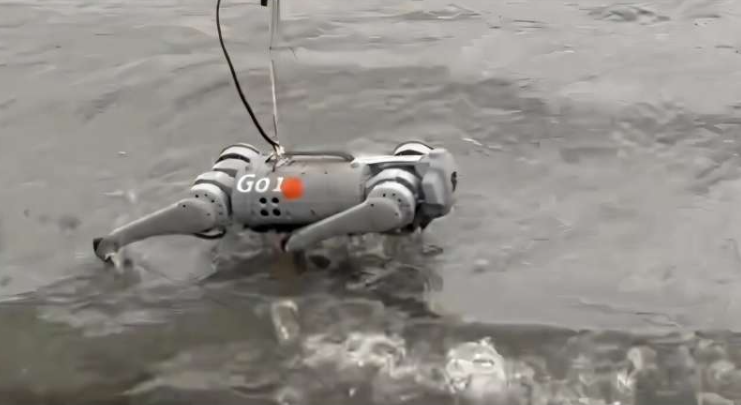
Geïnspireerd hierdoor ontwikkelden de onderzoekers siliconen voeten voor een benen robot die hetzelfde gedrag nabootst.Het testen op modderige oppervlakken toonde aan dat deze eenvoudige aanpassing de zinken en de zuigkracht van de robot met de helft verminderde, waardoor het energieverbruik met maximaal 70%werd verlaagd.
Volgens de onderzoekers zijn geen nadelen geïdentificeerd met de aangepaste "robo-moose" voeten.
Hoewel been robots al tientallen jaren worden bestudeerd en energiezuiniger en aanpasbaarder worden, blijven bepaalde natuurlijke terreinen bijzonder uitdagend.Deze nieuwe voeten zijn bedoeld om dergelijke obstakels te overwinnen door te verbeteren hoe robots hun bewegingen aanpassen aan verschillende grondomstandigheden.
Lab -experimenten met echte elandenvoeten hebben hun unieke functionaliteit bevestigd.Bij het stappen in en uit modder, breiden de gesplitste hoeven van de elanden zich uit en samentrekken ze hun contactgebied aan.Het primaire voordeel is echter niet het verhoogde oppervlak.In plaats daarvan komt het van hoe de gespleten hoeven de zuigkracht breken wanneer ze uit de modder worden getrokken.
Onderzoekers merkten op dat de hoef van een eland op dezelfde manier functioneert als een zuigbeker.Door zijn vorm aan te passen, breekt de hoef de zuigkracht die wordt gecreëerd door modder, net zoals een zuigbeker van een oppervlakte prijzen.Modder gedraagt zich op dezelfde manier als een natte badkamertegel, die zuigkracht genereert onder de voeten van het dier, waardoor tillen het been uitdagend maakt.De beweging van de hoeven verstoort deze spanning en vergemakkelijkt een gemakkelijkere beweging.De hoeven maken beweging sneller en energiezuiniger, waardoor potentieel fatale situaties worden voorkomen waarin het dier te diep zou kunnen zinken, vastlopen en vergaan.
Geïnspireerd hierdoor ontwikkelden de onderzoekers siliconen voeten voor een benen robot die hetzelfde gedrag nabootst.Het testen op modderige oppervlakken toonde aan dat deze eenvoudige aanpassing de zinken en de zuigkracht van de robot met de helft verminderde, waardoor het energieverbruik met maximaal 70%werd verlaagd.
Volgens de onderzoekers zijn geen nadelen geïdentificeerd met de aangepaste "robo-moose" voeten.